Photovoltaikanlagen

Beschreibung der Anwendung
Der technologische Fortschritt der letzten Jahrzehnte hat zu einem exponentiellen Wachstum des globalen Energieverbrauchs geführt, durch den die Hauptenergiequellen (Erdöl, Gas und Kohle) langsam erschöpft werden; folglich steigt die Notwendigkeit, erneuerbare Energiequellen zu erschaffen.
Durch Forschung und Innovation konnte in den letzten Jahren die Sonne als alternative Energiequelle immer besser genutzt werden, wodurch der Photovoltaikmarkt kontinuierlich wächst. Gleichzeitig wird eine immer höhere Effizienz der Umwandlungsanlagen mittels .
Technologien erreicht, welche die Energieproduktion und die Leistungsfähigkeit der Photovoltaikmodule deutlich steigern, wie zum Bespiel durch elektromagnetische und elektronische Systeme, die der Laufbahn der Sonne so lange wie möglich folgen (Solar-Tracker).
Die verschiedenen Typen von Solar-Trackern lassen sich auf der Grundlage von drei Hauptfaktoren einordnen:
1. Schwenkmechanismus
- Aktive Tracker,, die von elektromagnetischen Elementen in Bewegung gesetzt werden;
- Passive Tracker, die von unabhängigen, physikalischen Mechanismen in Gang gesetzt werden und keine elektrische Energie benötigen.
2. Grad der Bewegungsfreiheit
- Einachsige Tracker: besitzen nur eine einzige Schwenkachse, um die sie sich drehen.
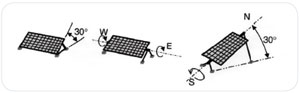
Sie werden wiederum aufgeteilt in:
- Neige-Tracker: die Rotationsachse ist Ost-West
- Roll-Tracker:: die Rotationsachse ist Nord-Süd
- Azimut-Tracker: besitzen einen Freiheitsgrad mit vertikaler Zenith-Nadir-Achse
- Tracker mit Polarachse: bewegen sich auf einer zum Boden geneigten Achse ungefähr parallel zur Erdrotationsachse und garantieren so die höchste Effizienz, die mit einer einzigen Rotationsachse erreicht werden kann.
- Biaxiale Tracker: verfügen über zwei Freiheitsachsen, mittels derer die horizontale Achse auf den Photovoltaikpaneelen perfekt und in Echtzeit an den Sonnenstrahlen ausgerichtet werden, Nachteil ist eine größere Konstruktionskomplexität.
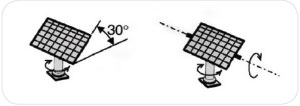
Sie werden wiederum aufgeteilt in:
- Azimut-Anhebung-Tracker: folgen der Sonne mittels einer Kontroll-SPS an jeden Punkt des Himmels; sie besitzen ein Gestell vom Typ Azimut, das aus einer vertikalen Hauptachse und einer rechtwinklig zum Erdreich stehenden Sekundärachse besteht
- Neige-Roll-Tracker: folgen der Sonne mittels einer Kontroll-SPS an jeden Punkt des Himmels; ihre Hauptachse verläuft parallel zum Boden und die Sekundärachse normalerweise rechtwinklig zum Erdreich.
3. Steuertyp
- Analog: Der Steuerbefehl wird auf Grundlage der Informationen eines Sensors generiert, der den hellsten Punkt am Himmel erkennt;
- Digital: Der Steuerbefehl stammt von einem Mikroprozessor, in dem die Position der Sonne am Himmel zu jedem Moment des Jahre gespeichert ist.
Die Mehrheit der Solar-Nachführer oder -Tracker wird von Gleichstrom- oder Drehstrom-Elektromotoren gespeist; da das System generell eine geringe Rotationsgeschwindigkeit besitzt, ist häufig ein Untersetzungsgetriebe notwendig, das die Motorgeschwindigkeit auf eine geeignete Geschwindigkeit für eine korrekte "Nachführung" reduziert.
Die Wahl des Nachführsystems hängt von zahlreichen Faktoren ab, etwa von der Größe und den Merkmalen sowohl des Gestells als auch des Installationsstandortes hinsichtlich Breitengrad, meteorologischen und klimatischen Bedingungen.
Motovario-Lösungsbeispiel
Im Sektor der Ernergieerzeugung über Photovoltaikanlagen liefert Motovario Schneckengetriebemotoren für Motovario Schneckengetriebemotoren für Siliziumproduktionsanlagen und für den Antrieb von monoaxialen und biaxialen Solar-Trackern.
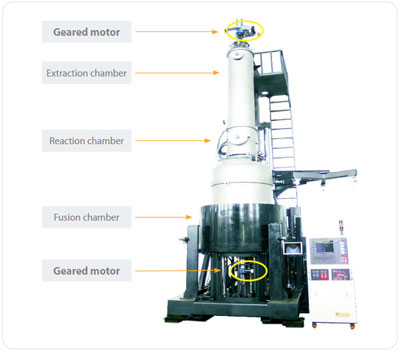
- Eine Produktionsanlage für monokristallines Silizium besteht generell aus einer Fusionskammer, einer Reaktionskammer und einer Extraktionskammer; die gelieferten Getriebe regulieren die Drehbewegung und das Auflesen der Siliziumkristalle.
- Für den Rotationsmechanismus der Fusionskammer wird ein Schneckengetriebe NMRV 040 verwendet;
- Für den Hebemechanismus in der Fusionskammer wird ein Schneckengetriebe NMRV 040 verwendet.;
- Für den Hebemechanismus in der Extraktionskammer wird ein Schneckengetriebe NMRV 040 verwendet.
- Für den Rotationsmechanismus der Extraktionskammer wird ein kombiniertes Schneckengetriebe NMRV 030 + NMRV POWER 063 verwendet.
Für die Bewegung des Roll-Solar-Trackers wird ein kombinierter Getriebemotor verwendet NMRL 050 + NMRV-P 110

| Untersetzungsverhältnis (i) | 600 |
| Durchmesser Abtriebshohlwelle | Ø42 |
| Konstruktive Besonderheiten | Drehmomentbegrenzer zwischen den beiden Getrieben |
| Motorgröße | 080 - 4 poli |
| Motorleistung | 1,1 kW |
Für die Neige-Bewegung des biaxialen Solar-Trackers wird ein Getriebemotor NMRV 040 verwendet

| Untersetzungsverhältnis (i) | 30 |
| Durchmesser Abtriebshohlwelle | Ø18 |
| Motorgröße | 063 - 4 polig |
| Motorleistung | 0,25 kW |
Für die Azimut-Bewegung des biaxialen Solar-Trackers, werden je nach Größe folgende Getriebemotoren verwendet:
- Kombinierter Getriebemotor NMRV 040 + NMRV POWER 090
| Untersetzungsverhältnis (i) | 1800 |
| Durchmesser Abtriebshohlwelle | Ø35 |
| Motorgröße | 063 - 4 polig |
| Motorleistung | 0,18 kW |
- Kombinierter Getriebemotor NMRV 050 + NMRV POWER 110
| Untersetzungsverhältnis (i) | 1800 |
| Durchmesser Abtriebshohlwelle | Ø42 |
| Motorgröße | 063 - 4 polig |
| Motorleistung | 0,22 kW |
Die Entscheidung für ein Schneckengetriebes für den Solar-Tracker ist aus folgenden Gründen die richtige:
- Hohes Übertragungsverhältnis bei geringen Abmessungen, das eine langsame Rotation des Paneels ermöglicht;
- Reduziertes Achsenspiel;
- Hinzufügen des Drehmomentbegrenzers möglich;
- Irreversible Bewegung der langsamen Welle, die die Drehung des Trackers in die entgegengesetzte Richtung verhindert

