Fotovoltaico

Descrizione dell'applicazione
Lo sviluppo tecnologico degli ultimi decenni ha portato una crescita esponenziale del consumo energetico globale che sta via via esaurendo le principali fonti di energia (petrolio, gas e carbone); ciò si traduce nella crescente necessità di creare fonti di energia rinnovabili.
Lo sviluppo della ricerca e dell’innovazione ha sfruttato sempre più negli ultimi anni il sole come fonte di energia alternativa; di conseguenza stiamo assistendo ad una costante crescita del mercato dell’energia fotovoltaica.
Si ricerca pertanto una sempre maggior efficienza degli impianti di conversione attraverso tecnologie in grado di migliorare notevolmente la produzione di energia dei moduli fotovoltaici che ne aumentano il rendimento, come ad esempio sistemi elettromeccanici ed elettronici che seguono la traiettoria del sole per il maggior tempo possibile (inseguitori solari).
Si possono individuare tre principali fattori in base ai quali classificare le diverse tipologie di inseguitori solari:
1. MECCANISMO DI ORIENTAMENTO
- Inseguitori attivi, nel caso vengano messi in movimento da elementi elettromeccanici;
- Inseguitori passivi, nel caso vengano messi in movimento da fenomeni fisici autonomi che non necessitano di energia elettrica.
2. GRADI DI LIBERTÀ DI MOVIMENTO
- Inseguitori Monoassiali: dispongono di un solo grado di libertà e ruotano attorno ad un solo asse.
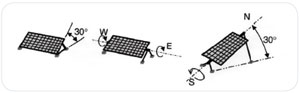
Vengono a loro volta classificati in:
- Inseguitori di tilt: l’asse di rotazione è est-ovest
- Inseguitori di rollio: l’asse di rotazione è nord-sud
- Inseguitori di azimut: dispongono di un grado di libertà con asse verticale zenit-nadir
- Inseguitori ad asse polare: si muovono su un unico asse inclinato rispetto al suolo e circa parallelo all’asse di rotazione terrestre garantendo la massima efficienza che si possa ottenere con un solo asse di rotazione.
- Inseguitori Biassiali: dispongono di due gradi di libertà, attraverso cui l’asse ortogonale ai pannelli fotovoltaici stessi viene allineata perfettamente ed in tempo reale con i raggi solari, a scapito però di una maggior complessità costruttiva.
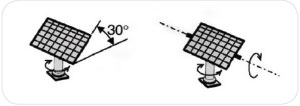
Vengono a loro volta classificati in:
- Inseguitori azimut-elevazione: attraverso un PLC di controllo inseguono il sole in un qualsiasi punto del cielo; hanno una montatura di tipo altazimutale formata dall’asse principale verticale rispetto al terreno e quello secondario perpendicolare ad esso;
- Inseguitori tilt-rollio: attraverso un PLC di controllo inseguono il sole in un qualsiasi punto del cielo; hanno l’asse principale parallelo rispetto al suolo e quello secondario normalmente perpendicolare ad esso.
3. TIPOLOGIA DI COMANDO
- Analogici: il comando è generato sulla base delle informazioni di un sensore che individua la posizione del punto più luminoso nel cielo;
- Digitali: il comando proviene da un microprocessore che, tramite tabelle memorizzate, conosce in ogni momento la posizione del sole nel cielo.
La maggior parte degli inseguitori o tracker solari è alimentata da motori elettrici in corrente continua o trifase in corrente alternata; tenendo conto che il sistema ha generalmente una bassa velocità di rotazione, è spesso necessario l’utilizzo di un riduttore che riduca la velocità del motore ad una velocità accettabile per garantire il corretto “inseguimento”.
La scelta del sistema di inseguimento dipende da numerosi fattori, che includono le dimensioni e le caratteristiche sia della struttura che del luogo di installazione, la latitudine, le condizioni meteorologiche e quelle climatiche.
Esempio di soluzione Motovario:
Nell’ambito del settore di produzione di energia attraverso impianti fotovoltaici, Motovario è fornitrice di motoriduttori a vite senza fine per gli impianti di formazione del silicio e per la movimentazione di inseguitori solari monoassiali e biassiali.
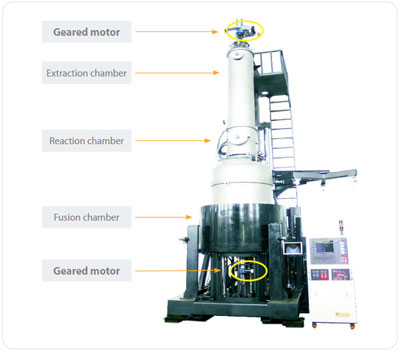
- L’impianto di formazione del silicio monocristallino di cui si compone un modulo fotovoltaico è generalmente composto da una camera di fusione, una camera di reazione ed una camera di estrazione; i riduttori forniti regolano il movimento rotativo e di sollevamento del seme di silicio monocristallino.
- Per il meccanismo di rotazione nella camera di fusione viene utilizzato un Riduttore a vite senza fine NMRV 040.
- Per il meccanismo di sollevamento nella camera di fusione viene utilizzato un Riduttore a vite senza fine NMRV 040.
- Per il meccanismo di sollevamento nella camera di estrazione viene utilizzato un Riduttore a vite senza fine NMRV040.
- Per il meccanismo di rotazione nella camera di estrazione viene utilizzato un Riduttore a vite senza fine combinato NMRV 030 + NMRV POWER 063.
Per la movimentazione dell’inseguitore solare di rollio viene utilizzato un Motoriduttore combinato NMRL 050 + NMRV-P110

| Rapporto di riduzione (i) | 600 |
| Diametro albero d’uscita cavo | Ø42 |
| Particolarità costruttive | Limitatore di coppia tra i due riduttori |
| Grandezza motore | 080 - 4 poli |
| Potenza Motore | 1,1 kW |
Per il movimento di tilt dell’inseguitore solare biassiale viene utilizzato un Motoriduttore NMRV 040

| Rapporto di riduzione (i) | 30 |
| Diametro albero d’uscita cavo | Ø18 |
| Grandezza motore | 063 - 4 poli |
| Potenza Motore | 0,25 kW |
Per il movimento azimutale dell’inseguitore solare biassiale, in base alla grandezza, vengono utilizzati:
- Motoriduttore combinato NMRV 040 + NMRV POWER 090
| Rapporto di riduzione (i) | 1800 |
| Diametro albero d’uscita cavo | Ø35 |
| Grandezza motore | 063 - 4 poli |
| Potenza Motore | 0,18 kW |
- Motoriduttore combinato NMRV 050 + NMRV POWER 110
| Rapporto di riduzione (i) | 1800 |
| Diametro albero d’uscita cavo | Ø42 |
| Grandezza motore | 063 - 4 poli |
| Potenza Motore | 0,22 kW |
Per quanto riguarda l’inseguitore solare la scelta del riduttore a vite senza fine è vincente per i seguenti motivi:
- Alto rapporto di trasmissione, con ingombri contenuti, per garantire una rotazione lenta del pannello;
- Gioco assiale ridotto;
- Possibilità di inserimento del limitatore di coppia;
- Irreversibilità del moto sull’albero lento che non permette il movimento del tracker in senso opposto.

