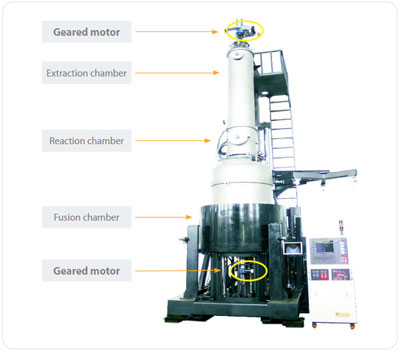
Photovoltaic Systems

Application description
The technological development of recent decades has led to the exponential growth in the global energy consumption which is gradually running out the main sources of energy (oil, gas and coal); this results has taken to the increasing need to create a sources of renewable energy.
In the last years the development of the research and innovation have increased the utilization of solar power as an alternative energy source and we are consequently seeing a steady growth of photovoltaic market.
Therefore it’s necessary an efficiency increasing through technologies able to improve the energy production of photovoltaic modules, such as electromechanical and electronic systems which follow the trajectory of the sun as long as possible (solar trackers).
It’s possible to classify the different types of solar trackers according to three main factors:
1. ORIENTATION MECHANISM
- Active trackers, in case they are set in motion by electromechanical elements;
- Passive trackers, in case they are set in motion by autonomous physical phenomena that do not require electricity.
2. DEGREES OF FREEDOM OF MOVEMENT
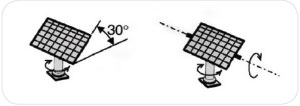
- Single-axis trackers: these have only one degree of freedom and rotate about a single axis.
These equipments are classified into:
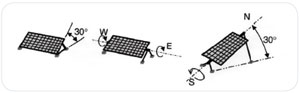
- Tilt solar trackers: the rotation axis is east-west
- Roll solar trackers: the rotation axis is north-south
- Azimuthal Solar tracker: the movement is around a vertical zenith-nadir axis
- Polar axis Solar tracker: these move along a single axis inclined to the ground and approximately parallel to the Earth rotation axis, giving the maximum efficiency which can be achieved with only one axis of rotation.